Tutorial: Visibility Graphs¶
The objective of this tutorial is to introduce the network-based method of visibility graphs for nonlinear time series analysis, and to illustrate its implementation in the pyunicorn package. First some theoretical background for understanding visibility graphs will be given, and then some of the methods in timeseries.VisibilityGraph will be highlighted. For a detailed discussion and further references, please consult Donges et al.
(2015), on which this tutorial is based.
Introduction¶
Visibility Graphs (VG) encode visibility relations between data points in the one-dimensional time domain, by drawing upon analogies between height profiles in physical space and the profile of a time series graph. More precisely, VGs are based on the existence or non-existence of lines of sight between well-defined objects (Donges et al., 2015). They can be applied to investigate purely temporal features such as long-range correlations (Lacasa et al., 2009) or time reversal asymmetry (Donges et al., 2013).
Theory of Time Series Visibility Graphs (VGs)¶
Standard VG¶
In a time series context, well-defined objects between which lines of sight can be established are the sampling points of a (univariate) time series graph. These sampling points are uniquely characterised by pairs
Put differently, the topological properties of VGs take into account the time-ordering of observations explicitly and are thus closely related to the roughness of the underlying time series profile. An illustration of a timeseries with respective visibility relations (grey lines) can be seen in the figure below, taken from Donner and Donges (2012). The VG of a time series stays invariant under arbitrary affine transformations.

Horizontal VG¶
A notable algorithmic variant are horizontal visibility graphs (HVGs) that facilitate analytical investigations of graph profiles (Luque et al., 2009). For HVGs, the more restrictive condition
is used and the linkset of a HVG is a subset of that of a standard VG. A HVG remains invariant only for uniform translations and rescaling of the original data. An illustrative example of a HVG can be seen in the figure below, taken from Luque et al. (2009). In the upper part a time series is plotted with the respective horizontal visibility relations (arrowed lines), and in the lower part the resulting mapping to a HVG can be seen.

Testing Time Series Irreversibility¶
By decomposing degrees and local clustering coefficients for VGs and HVGs into contributions from past and future observations, statistical properties under time-reversal of time series can be analysed. Statistically significant deviations are often found between the distributions of time-directed vertex properties for non-linear systems that are known to be time-irreversible, but not for linear systems (Donges et al., 2013).
Time-Directed Vertex Properties¶
To account for the fact that the time-ordering of data is intrinsically interwoven with the resulting network structure of VGs and HVGs, a set of statistical network quantifiers can be defined, based on two simple vertex (node) characteristics:
Decomposing the degree
In a similar manner, the local clustering coefficient
Irreversibility Test via Kolmogorov-Smirnov (KS)¶
Looking at the frequency distributions of the retarded and advanced sequences for one vertex characteristic, in case of time reversibility it is expected that they should be drawn from the same probability distributions, e.g.,
For sufficiently long time series, the samples of individual vertex properties approximate the underlying distributions sufficiently well, and the Kolmogorov-Smirnov (KS) test can be used to check this hypothesis. Specifically, a small
Application of VGs¶
As an example for the application of VGs and HVGs and of the class VisibilityGraph, a linear and a non-linear time series will be tested first visually, and then with the KS test for irreversibility.
First Steps¶
[1]:
import math
import numpy as np
from matplotlib import pyplot as plt
from pyunicorn.timeseries import VisibilityGraph
Synthetic Data¶
First, we create and plot a linear time series, based on a linear-stochastic first-order autoregressive model (AR(1)) with an additive Gaussian noise term:
where
[2]:
# we set a seed to reproduce results later
np.random.seed(42)
# process parameters
a = 0.5
mu, sigma = 0, 1
# sample size
N = 5000
# Gaussian noise
x_t = np.random.normal(mu, sigma, N)
# AR(1)
w_t = np.zeros(N)
t = np.arange(0, N, 1)
for i in t[1:]:
w_t[i] = a*w_t[i-1] + x_t[i]
[3]:
plt.figure(figsize=(14, 4), tight_layout=True)
plt.plot(t, w_t)
plt.xlabel("$t$"); plt.ylabel("$w_t$")
plt.title("Examplary AR(1) time series");
Visibility Relations¶
Now we construct a VisibilityGraph instance. Note the keyword horizontal, which is False by default.
[4]:
VG1 = VisibilityGraph(w_t, horizontal=False)
print(VG1)
Calculating visibility relations...
VisibilityGraph: time series shape (5000,).
InteractingNetworks:
Network: undirected, 5000 nodes, 16703 links, link density 0.001.
[5]:
HVG1 = VisibilityGraph(w_t, horizontal=True)
print(HVG1)
Calculating horizontal visibility relations...
VisibilityGraph: time series shape (5000,).
InteractingNetworks:
Network: undirected, 5000 nodes, 9986 links, link density 0.001.
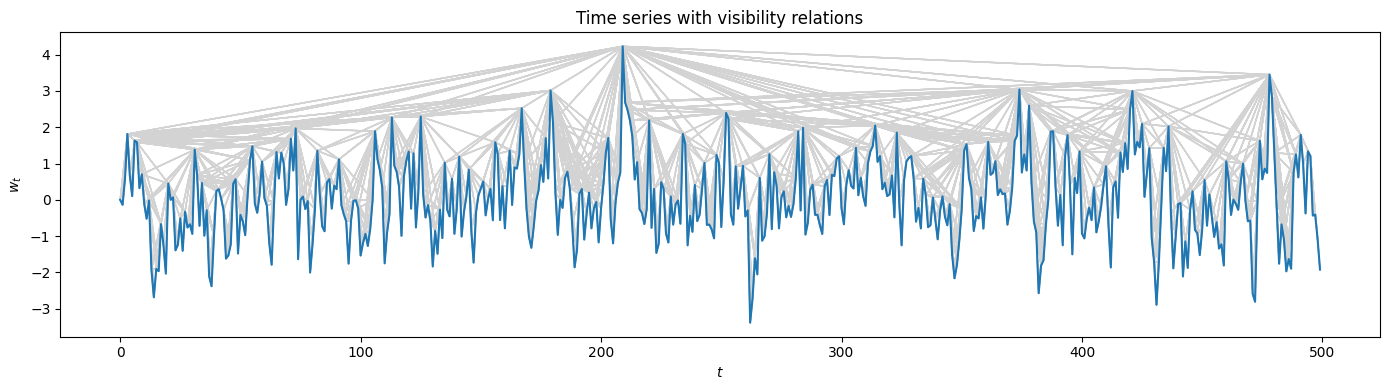
It can be illustrative to plot the visibility relations via the method VisibilityGraph.visibility_relations(). Note that here we zoom in along the time axis.
[6]:
# obtain the visibilty relations as a Boolean mask
visibility_relations = VG1.visibility_relations()
# zoom
cutoff = int(N/10)
# plotting the visibilty relations as grey arrows
plt.figure(figsize=(14, 4), tight_layout=True)
plt.plot(t[:cutoff], w_t[:cutoff])
plt.xlabel("$t$"); plt.ylabel("$w_t$")
plt.title("Time series with visibility relations")
for i in range(cutoff):
for k in range(cutoff):
if visibility_relations[i][k]:
plt.arrow(i, w_t[i], (k-i), (w_t[k]-w_t[i]), color='lightgrey')
Calculating visibility relations...
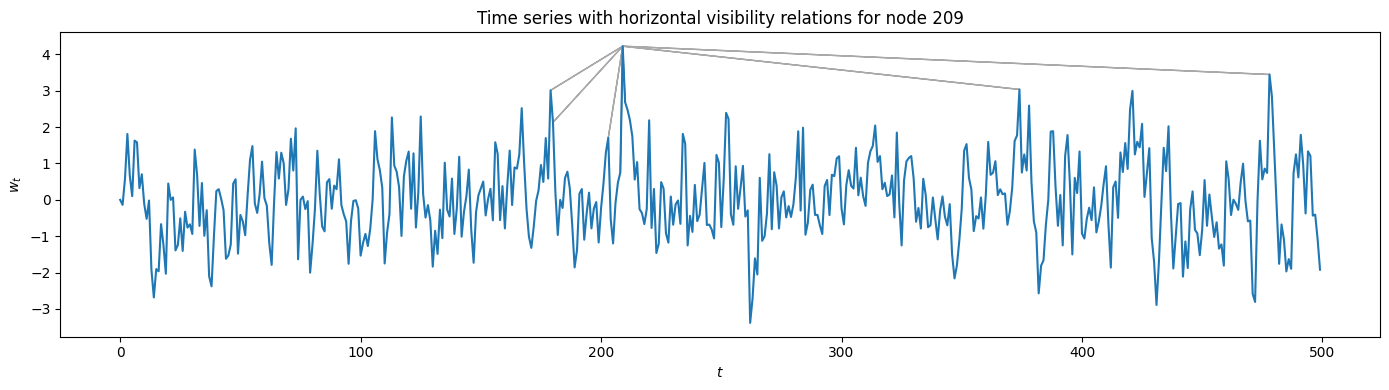
Of course, we can also plot the visibility relations for the HVG using VisibilityGraph.visibility_relations_horizontal(). In this case, only the visibility lines for one specific node are plotted as an example, albeit not horizontally.
[7]:
visibility_relations_horizontal = HVG1.visibility_relations_horizontal()
i = 209 # only plot the nodes visible from here
plt.figure(figsize=(14, 4), tight_layout=True)
plt.plot(t[:cutoff], w_t[:cutoff]) # zooming in a bit
plt.xlabel("$t$"); plt.ylabel("$w_t$")
plt.title(f"Time series with horizontal visibility relations for node {i}")
for k in range(cutoff):
if visibility_relations_horizontal[i][k]:
ax = plt.arrow(i, w_t[i], k-i, w_t[k]-w_t[i], color='darkgray')
Calculating horizontal visibility relations...
Irreversibility Test¶
Linear Time Series¶
We start by analysing the linear time series via its time directed degrees:
[8]:
k_r1 = VG1.retarded_degree()
k_a1 = VG1.advanced_degree()
Applied to a VG, both methods return an array with the corresponding degree for each node. For such an array, we can obtain the probability for each degree with a kernel-density estimate using Gaussian kernels. Kernel density estimation is a way to estimate the probability density function (PDF) of a random variable in a non-parametric way. We use scipy.stats.gaussian_kde for that.
[9]:
from scipy.stats import gaussian_kde
gkde_r1 = gaussian_kde(k_r1)
gkde_a1 = gaussian_kde(k_a1)
Now we plot
[10]:
def plot_time_directed(r, a, ylog=False):
plt.figure(figsize=(14, 3), tight_layout=True)
x = np.linspace(0, 12, 1000)
plt.plot(x, r.evaluate(x), color="red", label="retarded")
plt.plot(x, a.evaluate(x), color="black", label="advanced")
plt.xlabel("$k$"); plt.ylabel("$p(k)$")
if ylog:
plt.yscale("log")
plt.legend()
[11]:
plot_time_directed(gkde_r1, gkde_a1)
plot_time_directed(gkde_r1, gkde_a1, ylog=True)
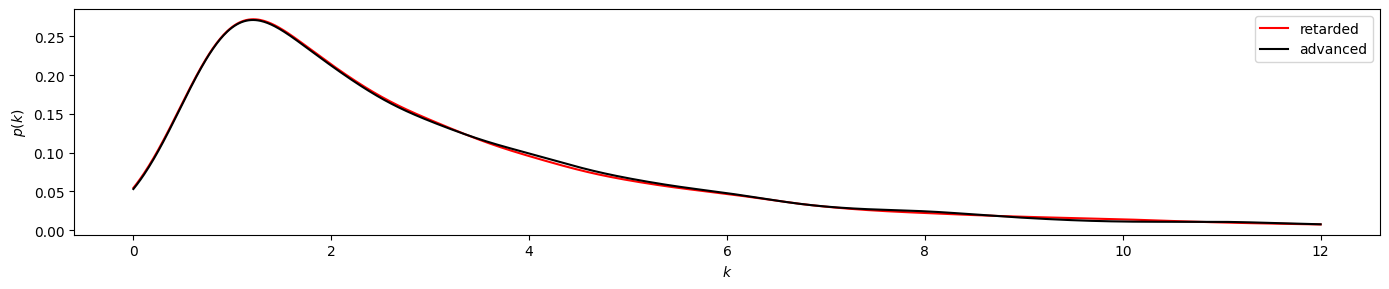
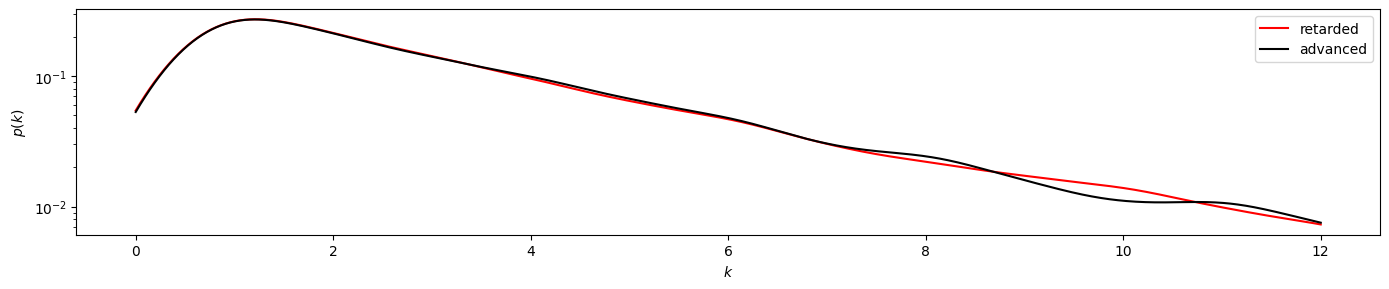
By visual investigation we already find strong similarities between the distributions. Now we also apply the KS test for this time series, using scipy.stats.ks_2samp to obtain the
[12]:
from scipy.stats import ks_2samp
ks_2samp(k_r1, k_a1)
[12]:
KstestResult(statistic=0.0072, pvalue=0.9994903068538411, statistic_location=3.0, statistic_sign=1)
The result of pvalue=0.999... > 0.05 indicates that the time series has likely been generated by a reversible process.
Non-Linear Time Series¶
Now we will perform the same procedure for a non-linear time series. We can construct one using the logistic map for instance, which we take from the tutorial on recurrence networks. We only change the bifurcation parameter (
[13]:
def logistic_map(x0: float, r: float, T: int, spinup: int = 100):
"""
Returns a time series of length T using the logistic map
x_(n+1) = r*x_n(1-x_n)
at parameter r and using the initial condition x0.
INPUT: x0 - Initial condition, 0 <= x0 <= 1
r - Bifurcation parameter, 0 <= r <= 4
T - length of the desired time series
spinup - number of spinup-timesteps before storing results to output
OUTPUT: numpy array of timeseries under given parameters
"""
# spinup
for n in range(spinup):
x0 = r * x0 * (1 - x0)
timeseries = np.zeros(T + 1)
timeseries[0] = x0
for n in range(T):
# get current timestep value
xn = timeseries[n]
# calculate next timestep value
xstep = r * xn * (1 - xn)
timeseries[n + 1] = xstep
return timeseries
[14]:
r = 4
x0 = 0.8
T = 5000
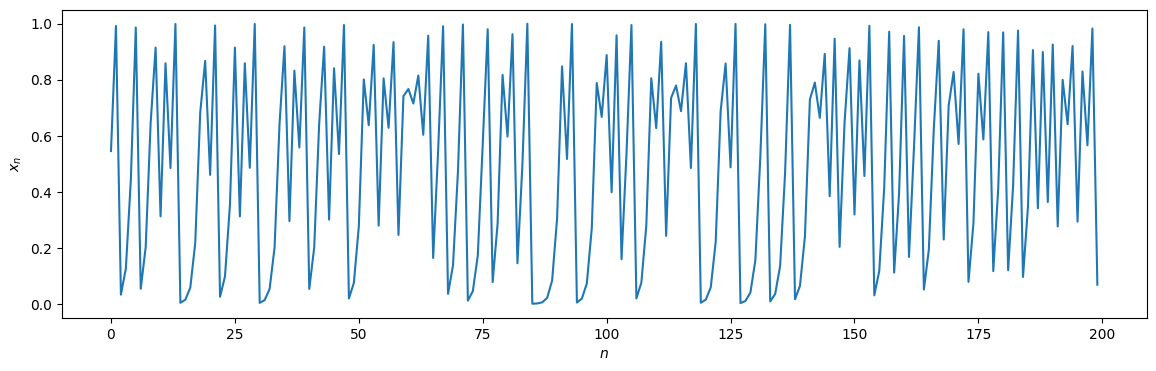
time_series = logistic_map(x0, r, T)
cutoff = 200
plt.figure(figsize=(14, 4))
plt.plot(time_series[:cutoff])
plt.xlabel("$n$"); plt.ylabel("$x_n$");
We again compare the time-directed degree distributions visually:
[15]:
VG2 = VisibilityGraph(time_series)
k_r2 = VG2.retarded_degree()
k_a2 = VG2.advanced_degree()
gkde_r2 = gaussian_kde(k_r2)
gkde_a2 = gaussian_kde(k_a2)
Calculating visibility relations...
[16]:
plot_time_directed(gkde_r2, gkde_a2)
plot_time_directed(gkde_r2, gkde_a2, ylog=True)
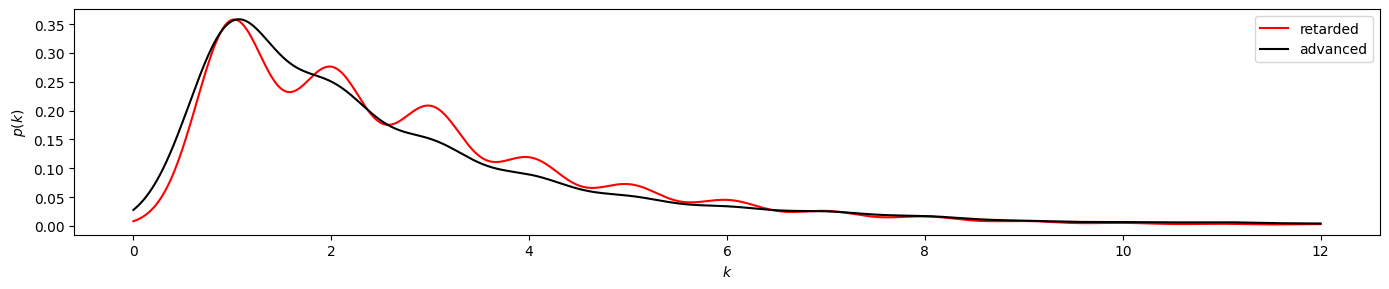
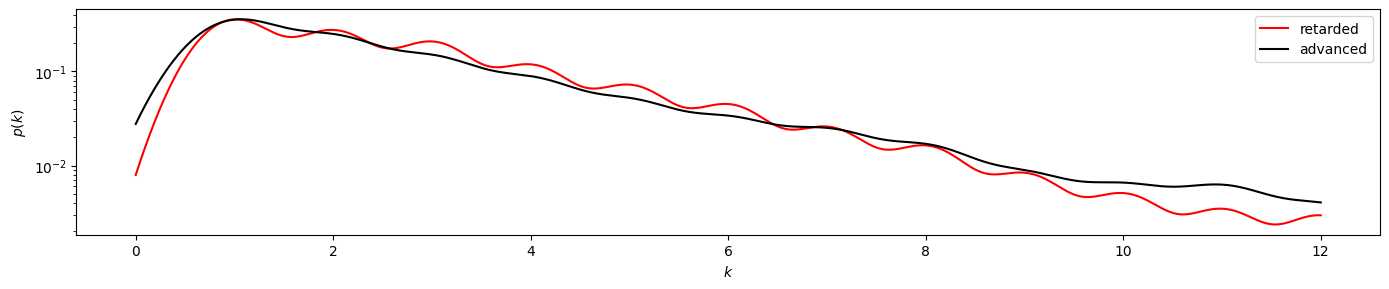
Here we find a stronger divergence between the retarded and advanced degree distributions, suggesting irreversibility of the underlying time series. And indeed, the KS test clearly yields pvalue < 0.050.
[17]:
ks_2samp(k_r2, k_a2)
[17]:
KstestResult(statistic=0.0593881223755249, pvalue=4.3359432807261227e-08, statistic_location=1.0, statistic_sign=-1)